2.5 Key Sensor Specifications
List of key sensors installed on AntBot and their coordinates relative to base_link.
Key Sensor Configuration
Section titled “Key Sensor Configuration”| Sensor | Qty | Connection | Notes |
|---|---|---|---|
| 3D LiDAR | 1 | Ethernet | 360° 3D point cloud |
| 2D LiDAR | 2 | USB | Front + Rear obstacle detection |
| RGB-D Camera | 1 | USB | Color + Depth |
| Mono Camera | 4 | V4L2 | Front 3 + Rear 1 |
| IMU | 1 | USB | 6-axis (accel + gyro) |
| GNSS | 1 | USB | GPS receiver |
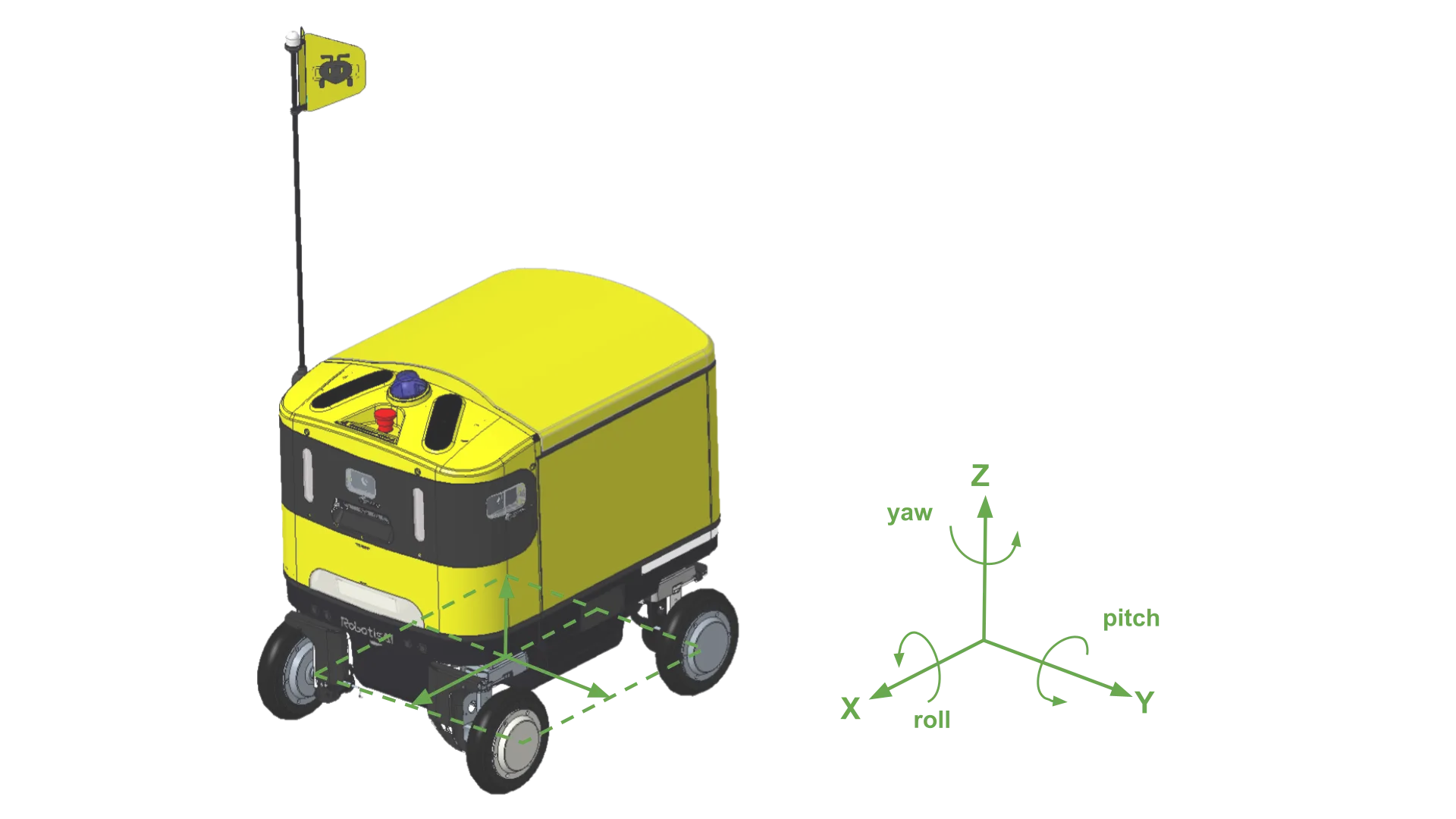
Sensor Coordinates
Section titled “Sensor Coordinates”- Position:
mm - Angle:
degree
Camera
Section titled “Camera”| Sensor | Position | X | Y | Z | Roll | Pitch | Yaw |
|---|---|---|---|---|---|---|---|
| Mono Camera | LEFT | 260.000 | 254.770 | 587.500 | 0 | 0 | 90 |
| Mono Camera | CENTER | 358.070 | 0 | 587.500 | 0 | 0 | 0 |
| Mono Camera | RIGHT | 260.000 | -254.770 | 587.500 | 0 | 0 | -90 |
| Mono Camera | BACK | -376.690 | 0 | 299.000 | 0 | 0 | 180 |
| RGB-D Camera | CENTER | 348.162 | 47.500 | 526.484 | 0 | 30 | 0 |
| Sensor | Position | X | Y | Z | Roll | Pitch | Yaw |
|---|---|---|---|---|---|---|---|
| 2D LiDAR | FRONT | 325.000 | 0 | 255.000 | 0 | 180 | 0 |
| 2D LiDAR | BACK | -325.000 | 0 | 255.000 | 180 | 0 | 0 |
| 3D LiDAR | FRONT | 225.332 | 0 | 724.904 | 0 | 10 | 0 |
Other Sensors
Section titled “Other Sensors”| Sensor | X | Y | Z | Roll | Pitch | Yaw |
|---|---|---|---|---|---|---|
| IMU | 240.000 | 6.75 | 390.200 | 0 | 0 | 180 |
| GNSS | 202.600 | -128.000 | 660.000 | 0 | 0 | 180 |
© 2026 ROBOTIS AI. All rights reserved.