5.3 시뮬레이션 환경 구축
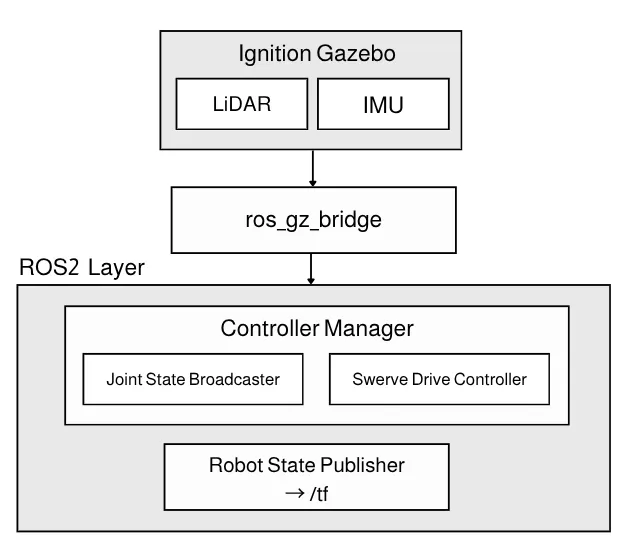
AntBot은 Ignition Gazebo(Fortress)에서 실물 하드웨어 없이 스워브 드라이브 로봇을 구동하고 테스트할 수 있습니다.
의존성 설치
섹션 제목: “의존성 설치”sudo apt install ros-humble-ros-gz ros-humble-ign-ros2-control \ ros-humble-xacro ros-humble-robot-state-publishercd ~/ros2_wscolcon build --symlink-install --packages-up-to antbot_gazebosource install/setup.bash-
Gazebo 시뮬레이션 실행
Terminal window # Terminal 1ros2 launch antbot_gazebo gazebo.launch.py -
키보드로 로봇 제어
Terminal window # Terminal 2ros2 run antbot_teleop teleop_keyboard
월드 변경
섹션 제목: “월드 변경”기본값은 빈 월드(empty)입니다. world 인자로 다른 월드를 지정할 수 있습니다:
# worlds.yaml에 등록된 이름으로 실행ros2 launch antbot_gazebo gazebo.launch.py world:=depot
# SDF 파일 경로로 직접 실행ros2 launch antbot_gazebo gazebo.launch.py world:=/path/to/world.sdf© 2026 ROBOTIS AI. All rights reserved.