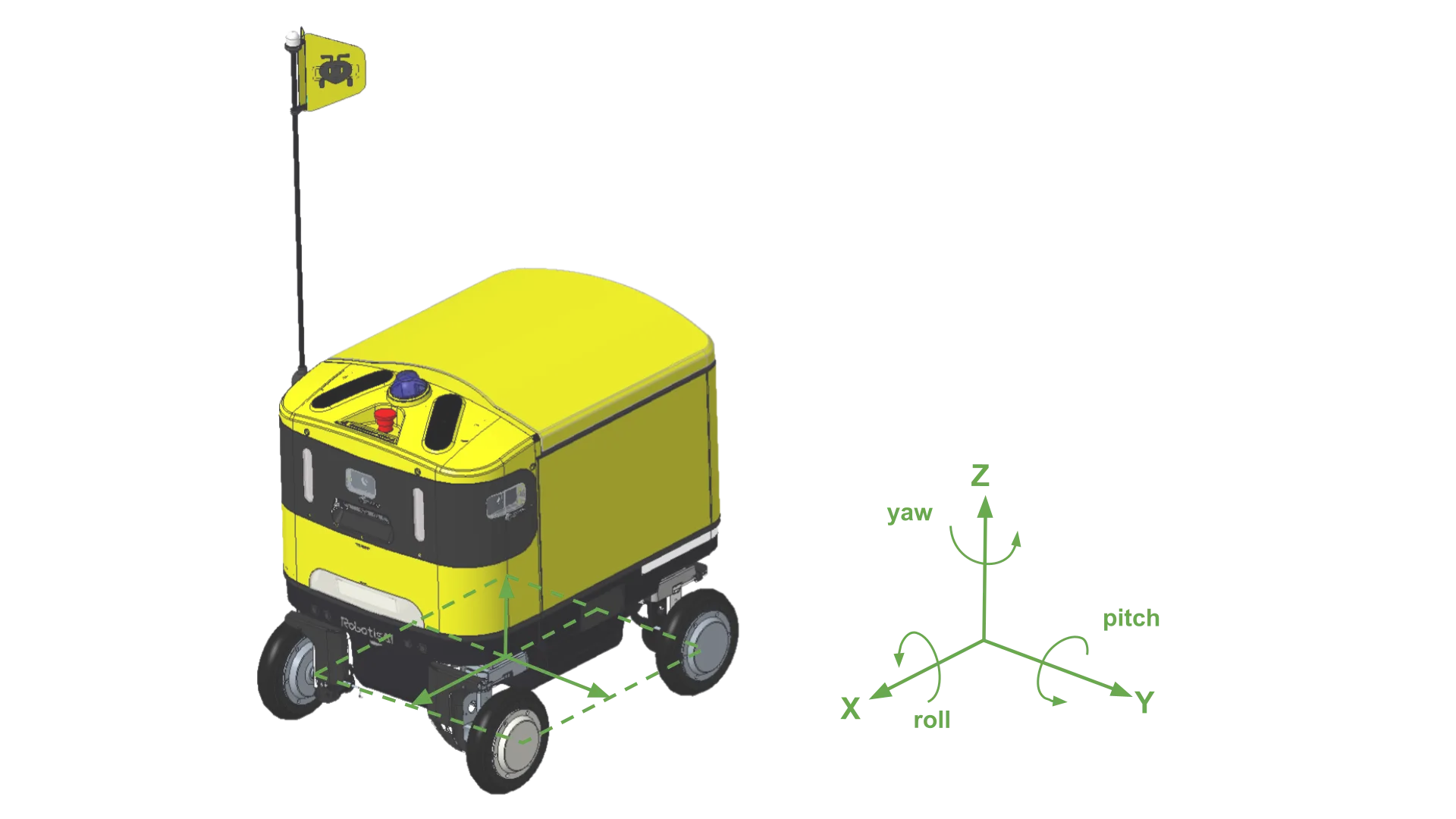
AntBot에 탑재된 주요 센서 목록과 base_link 기준 좌표입니다.
| 센서 | 수량 | 연결 | 비고 |
|---|
| 3D LiDAR | 1 | Ethernet | 360° 3D 포인트 클라우드 |
| 2D LiDAR | 2 | USB | 전방 + 후방 장애물 감지 |
| RGB-D 카메라 | 1 | USB | Color + Depth |
| 모노 카메라 | 4 | V4L2 | 전방 3 + 후방 1 |
| IMU | 1 | USB | 6축 (가속도 + 자이로) |
| GNSS | 1 | USB | GPS 수신기 |
| 센서 | 위치 | X | Y | Z | Roll | Pitch | Yaw |
|---|
| 모노 카메라 | LEFT | 260.000 | 254.770 | 587.500 | 0 | 0 | 90 |
| 모노 카메라 | CENTER | 358.070 | 0 | 587.500 | 0 | 0 | 0 |
| 모노 카메라 | RIGHT | 260.000 | -254.770 | 587.500 | 0 | 0 | -90 |
| 모노 카메라 | BACK | -376.690 | 0 | 299.000 | 0 | 0 | 180 |
| RGB-D 카메라 | CENTER | 348.162 | 47.500 | 526.484 | 0 | 30 | 0 |
| 센서 | 위치 | X | Y | Z | Roll | Pitch | Yaw |
|---|
| 2D LiDAR | FRONT | 325.000 | 0 | 255.000 | 0 | 180 | 0 |
| 2D LiDAR | BACK | -325.000 | 0 | 255.000 | 180 | 0 | 0 |
| 3D LiDAR | FRONT | 225.332 | 0 | 724.904 | 0 | 10 | 0 |
| 센서 | X | Y | Z | Roll | Pitch | Yaw |
|---|
| IMU | 240.000 | 6.75 | 390.200 | 0 | 0 | 180 |
| GNSS | 202.600 | -128.000 | 660.000 | 0 | 0 | 180 |